




Pengertian
Robot Line Follower adalah robot yang mengikuti garis pada sebuah
track khusus secara otomatis.Ada 2 macam robot line follower yaitu
Analog dan Mikrokontroller. Jika analog menggunakan fungsi2 logika pada
IC TTL tapi pada robot mikrokontroller dengan menggunakan progam yang
dibuat pada software komputer lalu diuploadkan ke dalam IC
mikrokontroller. Nah sekarang saya mau menjelaskan cara membuat robot
line follower Analog karena mudah pembuatannya.


Ada beberapa tahap yang harus diperhatikan:
- Pembuatan Sensor
- Pembuatan Board Pengendali Analog
- Lalu pembuatan mekanik dan gear box
- TAHAP PEMBUATAN SENSOR
Pada bagian ini menurut saya adalah hal yang cukup mudah dalam
pembuatan robot linfo,karena tidak memerlukan banyak komponen dan
pengecekannya yang mudah.Sensor dapat diartikan sebagai ‘mata’ dari
sebuah robot. Mata di sini digunakan untuk ‘membaca’ garis dari track
robot.
Pada robot line follower, sensor robot menggunakan photodioda dan led super bridge.
Cara
kerjanya :

Gambar Sensor tidak terkena cahaya
Jika
photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar
atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada
komparator sangat kecil atau dapat diasumsikan dengan logika 0.
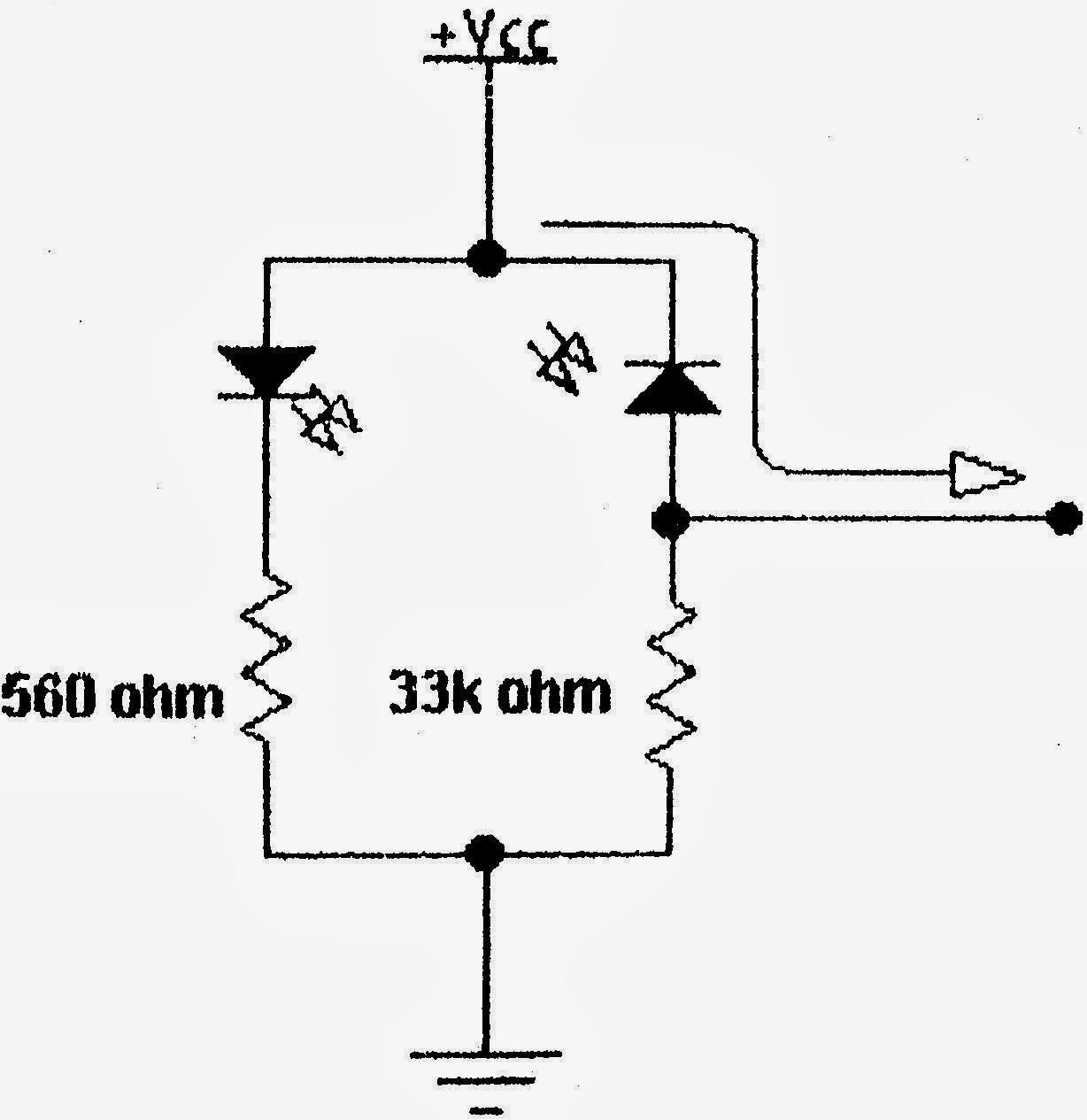
Gambar
Sensor terkena cahaya
Jika photo dioda terkena cahaya,
maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya
akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan
berlogika 1.
- PEMBUATAN BLOK PENGENDALI ANALOG
Komparator
Kita gunakan 2 IC (integrated circuit) saja, yaitu 1 buah LM339
(Komparator) dan 1 buah 74LS00 (NAND gate). Simple bukan? Di bawah ini
gambar kedua IC tersebut :

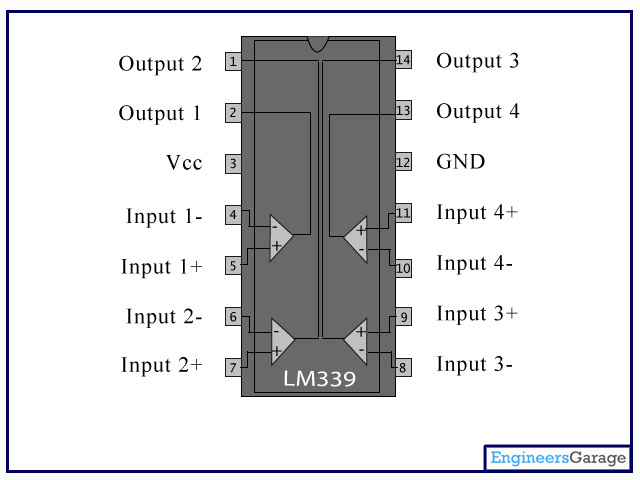
IC LM339
IC LM339 biasa disebut sebagai komparator. Yah, dari istilahnya saja sudah ketahuan kalau gunanya adalah untuk meng-compare (membandingkan).
Dengan kata lain, sesuatu yang berbentuk analog harus dikonversi dulu
ke dalam bentuk digital (deretan biner) pada dunia elektronika. Hal ini
bertujuan untuk mempermudah processing.
Satu buah komparator terdiri dari 2 input, yaitu Vin (input masukan dari sensor) dan Vref (tegangan
referensi). Pada dasarnya, jika tegangan Vin lebih besar dari Vref,
maka Vo akan mengeluarkan logika 1 yang berarti 5 Volt atau setara
dengan Vcc. Sebaliknya, jika tegangan Vin lebih kecil dari Vref, maka
output Vo akan mengeluarkan logika 0 yang berarti 0 Volt. Knapa kita
bisa membandingkan seperti ini? Nah, seperti yang sudah saya bahas di
poin sensor, sensor akan menghasilkan tegangan yang berbeda-beda ketika
dia membaca bidang putih atau hitam kan?
Kemudian,
jangan lupa untuk menambahkan resistor pull-up di keluaran komparator
(Vo). Hal ini disebabkan oleh perilaku IC LM339 yang hanya menghasilkan
logika 0 dan Z (bukan logika 1), sehingga si logika Z ini harus kita
tarik ke Vcc dengan resistor pull-up agar menghasilkan logika 1. Sip?
Setelah digabung dengan sensor, ilustrasi rangkaian menjadi seperti ini.


IC 74LS00
IC 74LS00 merupakan “NAND gate” yang berguna dalam teknologi digital.
NAND gate terkait dengan logika 0 dan 1 serta merupakan gate yang paling
simple dan bisa merepresentasikan semua jenis gate yang ada.
IC L293D
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
IC L293D
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.

- PEMBUATAN MEKANIK
Pada Robot yang saya buat, mekaniknya saya buat simple yaitu menggunakan penggabungan dari PCB Sensor yang saya lubangi lalu saya gabung dengan PCB Komparator menggunakan baut, setelah itu saya potong PCB yang tidak dipakai berbentuk persegi panjang untuk tempat baterai dan gearbox. Jika Pcb sudah jadi , pasang menggunakan baut pada PCB Komparator.
Oh ya.. untuk gearboxnya saya buat dari PCB lubang saya bentuk persegi menjadi 4 bagian, lalu saya rangkai seperti pemasangan pada Tamiya, Kalo mau beli perlengkapan gearbox cari saja di Toko tamiya banyak yang jual.Dan yang terakhir saya pisah menjadi 2 pasang lalu saya gabungkan dengan menggunakan baut lagi.. hehehe.. kalo udah jadi tinggal di Lem aja ke PCB yang buat pasang Baterai..
Ini bentuk Robot yang sudah jadi....

0 komentar:
Posting Komentar